Could not load library cudnn_cnn_infer64_8.dll.
Error code 126 Please make sure cudnn_cnn_infer64_8.
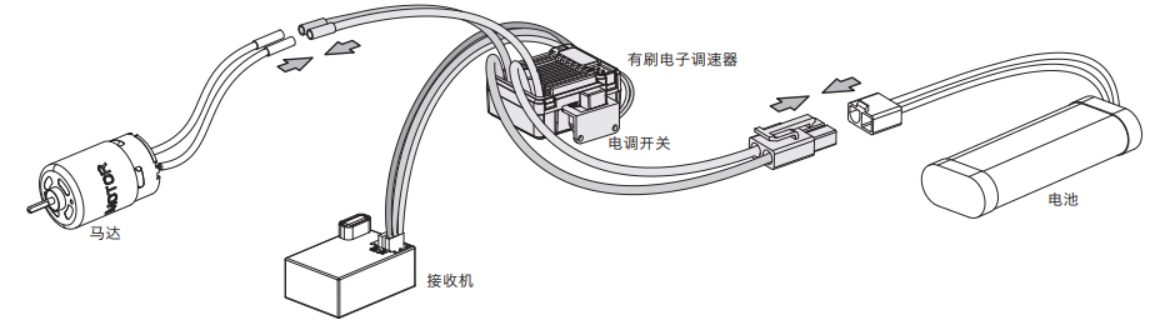
本文介绍了使用 I2C 通信控制 PCA9685 输出 PWM 信号驱动舵机(E6001)及电调(电调 (Hobbywing Quicrun WP 1625),实现对车行驶方向以及速度的控制功能。
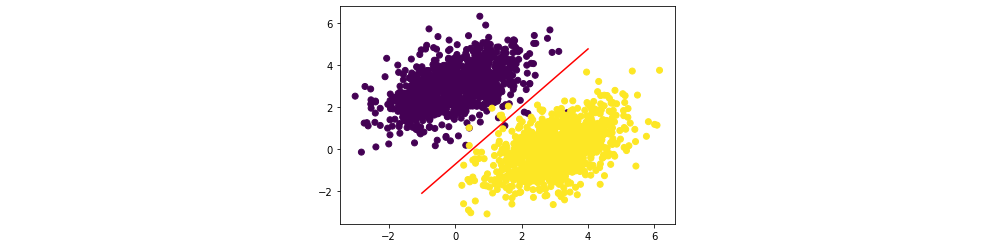
本文通过自行生成的一个特定的数据集,简单介绍了梯度下降的基本原理及过程。
基于勘智K210实现的深度学习智能循迹车,使用ESP32搭建HTTP服务器提供Web页面用于小车的遥控控制。在Google Colab环境下使用Keras并基于MobileNet进行模型训练实现小车的自动横向驾驶。
你好,世界!虽然很俗套,但我想了想决定还是用 Hello, World! 作为我博客第一篇文章的标题,因为我觉得对于每一个学习过编程的人都应该会对 Hello, World! 有着独特的情感吧。